
INFRAESTRUCTURAS Y EQUIPOS QUIRÚRGICOS Y DE DIAGNÓSTICO DE ÚLTIMA GENERACIÓN
En las últimas décadas se está experimentando un gran avance en las técnicas quirúrgicas utilizadas y a la vez en los equipos utilizados en estas, también cabe destacar que este avance se puede observar paralelamente en los equipos de diagnostico los cuales los más novedosos incluyen inteligencia artificial para poder obtener un diagnostico más preciso.
Relacionado con esto en este artículo se contemplará y explicará la instalación de un equipo quirúrgico y de diagnóstico de última generación los cuales se instalaron el pasado mes de Enero de 2019 en el centro “Clínica Diagonal”. Estos equipos son, un sistema quirúrgico Da Vinci X y un equipo de diagnostico TAC Optima CT520. Las instalaciones de estos equipos también incluyen la adaptación y modificación de espacios para cumplir los requisitos de trabajo y normativa aplicada a estos.
Robot Da Vinci X
Este sistema robótico se entiende como la última evolución de la cirugía mínimamente invasiva, posterior a la laparoscopia, en la que el cirujano no opera directamente con sus manos, sino manipulando un robot a distancia des de una consola de control la cual no necesariamente ha de estar situada en el mismo quirófano donde se realiza la intervención. El sistema computarizado del conjunto Da Vinci Xi es el encargado de transformar el movimiento del cirujano desde la consola de control en impulsos eléctricos los cuales se canalizan a los brazos robóticos.

Este sistema quirúrgico consta de unas ventajas significativas en el ámbito de cirugía las cuales son las siguientes:
➢ Visión 3D estereoscópica: mejora la eficiencia de las habilidades del cirujano y reduce considerablemente el tiempo de la intervención gracias a la mejora de calidad de imagen.
➢ Brazo endoscópico: reduce el tiempo operatorio ya que el cirujano tiene total control del endoscopio mientras interviene al paciente des de la consola de control, en comparación con las intervenciones manuales en estas se pierde mucho tiempo ya que mientras el cirujano está interviniendo, este no tiene total control del endoscopio ya que no puede realizar a la vez que interviene al paciente, el enfoque, el movimiento del endoscopio y la estabilización de la imagen sino que necesita un asistente el cual realizara dichas acciones según sus órdenes. Por otra parte, el sistema también consta de autoenfoque, alta precisión de movimientos y corrección de imágenes. Estas herramientas facilitaran al cirujano la realización de la intervención.
➢ Señales sensoriales visuales y acústicas: se incluye un sistema de información sensorial acústica y visual, el cual puede ser de gran utilidad si se controla de la forma correcta ya que contribuye a mejorar la concentración del cirujano y evitar daños al paciente producidos por mala praxis o utilización del sistema. Por desgracia este sistema de avisos acaba siendo desactivado.
➢ Control cómodo e intuitivo: a comparación de la endoscopia manual, la endoscopia mediante el sistema Da Vinci X permite que el cirujano permanezca sentado y de una forma cómoda para conseguir una mejor ergonomía mientras está interviniendo.
➢ Control del temblor de la mano: dicho sistema constar de 7 grados de libertad, lo que permite a los instrumentos mimetizar la muñeca humana. Para eliminar los temblores de las manos, se utiliza un sistema que filtra las altas frecuencias en el control del robot así eliminando el temblor natural del cirujano.
Partes de las que consta el sistema
El sistema consta de los siguientes elementos:

▪ Consola de cirujano o mesa de control: este elemento es des de donde se realizará el control del robot. Dicha consola de cirujano no debe estar necesariamente en el quirófano donde se realiza la intervención ya que el control del robot se puede realizar a distancia. En esta el cirujano ejecutara los movimientos que ha de realizar el robot de forma simultánea.

▪ Robot: este es el que efectúa los movimientos realizados por el cirujano en la consola de cirujano. Este se compone por cuatro brazos.

▪ Sistema de obtención de imágenes: el sistema de obtención de imágenes es el encargado de procesar las imágenes obtenidas des del sistema de endoscopia y plasmarlas en una pantalla. Desde la pantalla podremos modificar la resolución y aspecto de las imágenes.
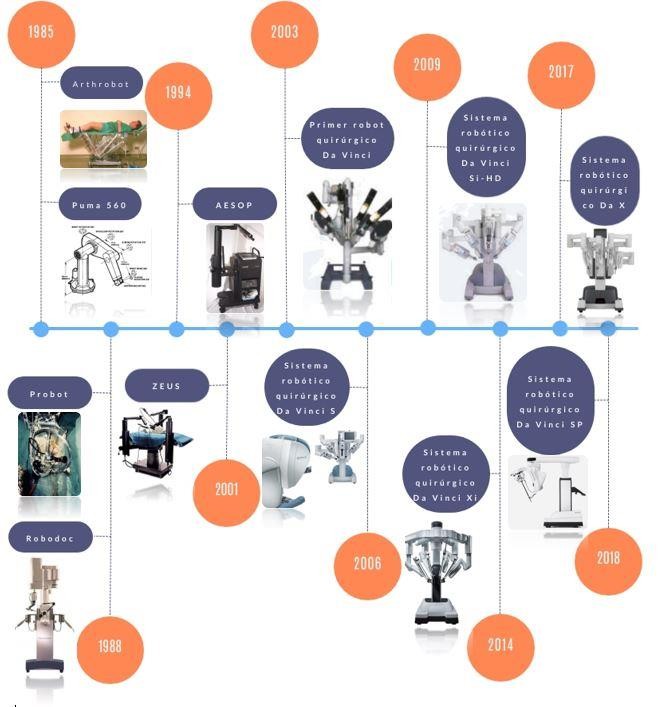
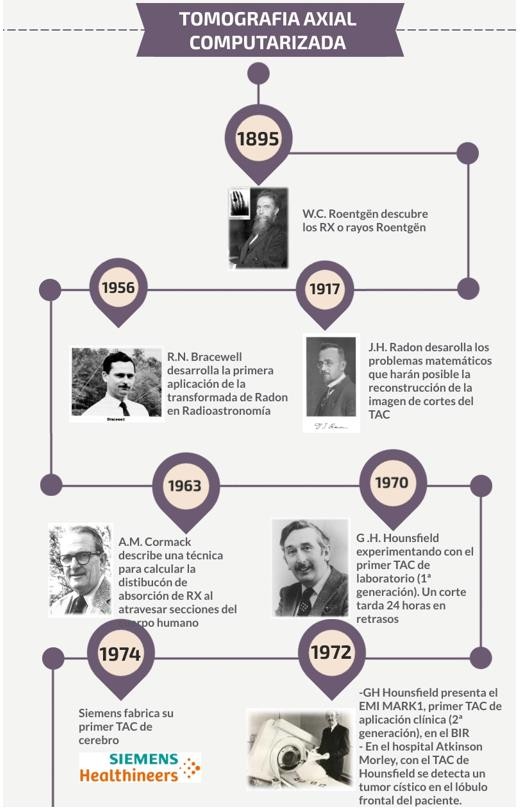
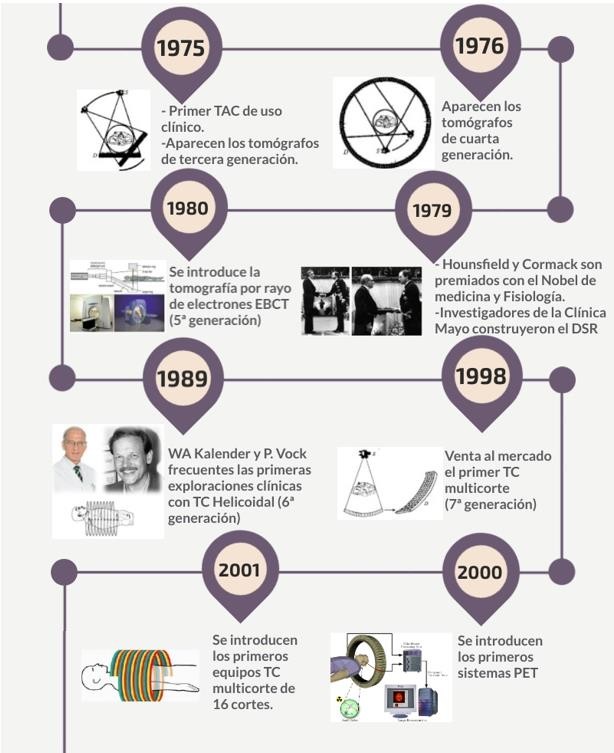
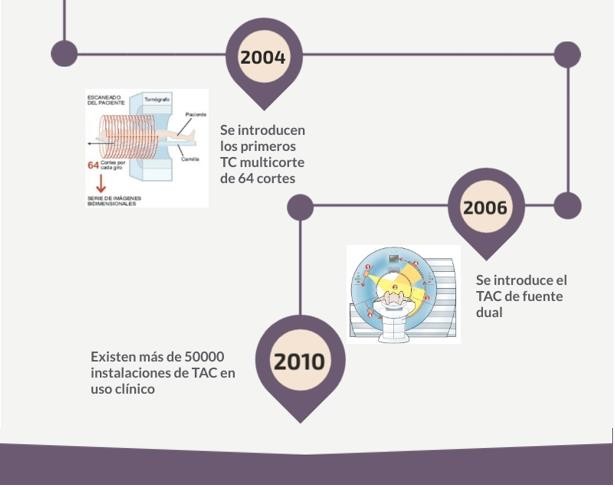
Historia
Características necesarias de la sala
Para poder utilizar este sistema en un área quirúrgica, anteriormente se deberá comprobar que la sala donde se vaya a colocar este sistema cumple los siguientes requisitos:
▪ La sala deberá dotar de unas dimensiones suficientes para que en esta se pueda disponer de los elementos del sistema, instrumental quirúrgico, equipamiento médico complementario y un mínimo de 5 personas. En esta los técnicos que asistan la operación deberán poderse mover libremente por la sala sin ningún impedimento u obstáculo.
▪ La sala donde se utilice el equipo deberá disponer de conexión a internet por cable (mediante conectores RJ45) o inalámbrica.
▪ La sala deberá disponer de los circuitos eléctricos especificados por el fabricante del sistema.
▪ La sala deberá disponer de una instalación empotrada de cableado de fibra óptica en la pared para conectar los elementos del sistema para que de tal forma quede la cantidad mínima posible de cableado de fibra óptica por el suelo.
Instalación
La instalación de dicho sistema es sencilla ya que lo único que deberá realizar el técnico para realizar la instalación será configurar el idioma del equipo, comprobar y calibrar los movimientos del equipo y por último conectar los elementos del sistema a los conectores de fibra óptica instalados en el quirófano habilitado para utilizar dicho sistema.
Tac Optima CT520

Antes de introducir el equipo instalado introduciremos en que consiste un equipo de tomografía axial computarizada.
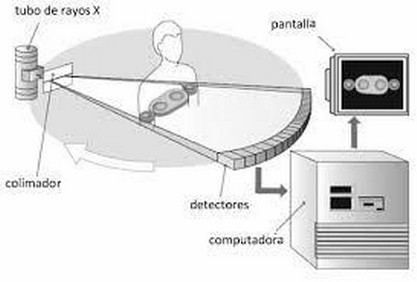
Un equipo de tomografía axial computarizada es una herramienta de examen diagnostico la cual utiliza un único tubo de rayos x (excepto en la tomografía computarizada de haz de electrones y los TAC de doble energía) para obtener imágenes radiográficas obtenidas des de diferentes ángulos de secciones perpendiculares del organismo, mediante la medición de la atenuación lineal de los rayos X en el paciente. La generación de imagen se realiza mediante un sistema informático que procesa las imágenes radiográficas en secciones progresivas de la zona del organismo estudiada realizando vistas transversales de la anatomía de un paciente. Si es necesario también mediante estas imágenes se puede generar una imagen en tres dimensiones de la zona que queremos observar.
Para la reconstrucción de las imágenes (ensamblado de todos los cortes y creación de las imágenes de los espacios entre corte y corte) la computadora a de utilizar una serie de cálculos para realizar las imágenes (algoritmos o filtros de reconstrucción), el algoritmo que se utilizará en la prueba lo escogerá el técnico. De estos algoritmos o filtros de reconstrucción existen varios los cuales concretan el tipo de reconstrucción de la imagen que se realizara en un TAC. Estos son los siguientes:
- Algoritmo de interpolación lineal: se utiliza cuando se quiere deducir un valor de atenuación comprendido entre dos valores ya conocidos en el eje. Este algoritmo se puede subdividir en dos algoritmos los cuales son los siguientes:
- Algoritmo de Interpolación Lineal de 180 grados (Slim): en este algoritmo, el ancho del espesor de corte será menos significativo que en el algoritmo Wide. Contra más se incremente el valor de “Pitch”, se incrementará el espesor de corte efectivo de forma gradual, lo que producirá que las imágenes mostradas reconstruidas se observen con más ruido.
- Algoritmo de Interpolación Lineal de 360 grados (Wide): a diferencia del algoritmo “Slim”, la reconstrucción de este muestra imágenes reconstruidas con menor ruido. Por otra parte, es importante saber que los fabricantes, no recomiendan la utilización de este algoritmo cuando el valor del “Pitch” utilizado sea mayor a 1.
- Algoritmo de extrapolación: se utiliza cuando se desea estimar un valor fuera de un rango de valores desconocidos.
Por otra parte el TAC puede representar de diferentes formas las imágenes obtenidas. Las imágenes obtenidas se pueden representar de los siguientes modos:
- MPR (Reconstrucción Multiplanar): la función de este tipo de reconstrucción es realizar imágenes bidimensionales no-axiales mediante la utilización de algoritmos matemáticos muy veloces. El proceso de la reconstrucción es el siguiente, primero se obtienen las imágenes de los cortes transversales y luego, se apilan los cortes. Mediante esta técnica se pueden reconstruir imágenes en plano sagital o coronal. La reconstrucción será calculada mediante los voxeles isotrópicos.
- MPR curva: la función que realizamos con esta opción es la de mediante una serie de planos perpendiculares de la imagen (corte) obtenida, convertir estos conjuntos de planos en un plano único o vista panorámica.
- 3D (3 dimensiones): mediante este tipo de reconstrucción, los objetos, son reproducidos en la memoria de la computadora, manteniendo sus características físicas (dimensión, volumen y forma).
- SSD (Reconstrucción de superficie sombreada): mediante este tipo de reconstrucción en tres dimensiones, se realiza la representación 3D de la superficie de un órgano o hueso que se ha definido mediante unidades Hounsfield (UH) por encima de un determinado valor de umbral (el cual determina el técnico que realiza la prueba).
- MIP (Proyección de máxima intensidad): mediante este tipo de reconstrucción se realiza el realce de estructuras con mayor atenuación a lo largo de varios cortes simultáneamente (representado en 3D), lo que facilita una visualización rápida y efectiva de estructuras.
- VR (Reconstrucción de volumen): este método de reconstrucción permite una visualización del volumen de estructuras en formato tridimensional de forma fácil y rápida. Reconstruye y muestra modelos 3D translucidos que permiten realizar un diagnóstico más fiable. Habiendo introducido el funcionamiento de un tomógrafo axial computarizado, ya podemos enumerar las principales características del TAC Optima CT520 e introducir dicho equipo. Las principales características del TAC Optima CT520 son las siguientes:
- Este equipo se puede utilizar para todo tipo de exploraciones excepto exploraciones cardiacas.
- Este es capaz de realizar hasta 16 cortes (imágenes) axiales por revolución.
- El bloque de recepción de rayos X consta de 24 líneas de detectores.
- Ofrece velocidades de exploración rotatoria variables.
- Reconstrucción en menos de 10 segundos.
- Tiempo de exploración helicoidal máximo de 120 segundos.
- Consta de control térmico automático y corrección. Por otra parte, consta de monitorización del estado en tiempo real.
- Este equipo se clasifica eléctricamente como equipo clase 1 tipo B con IPX0.
Partes de las que consta el sistema
Los principales componentes que componen el equipo TAC Optima CT520 son los siguientes:
- Gantry: esta es la estructura circular la cual aloja y da soporte a una serie de componentes los cuales rotan solidariamente gracias al sistema de anillos deslizantes, el cual además se encarga de la transmisión de corriente eléctrica para el funcionamiento de dichos componentes, los cuales son los siguientes:
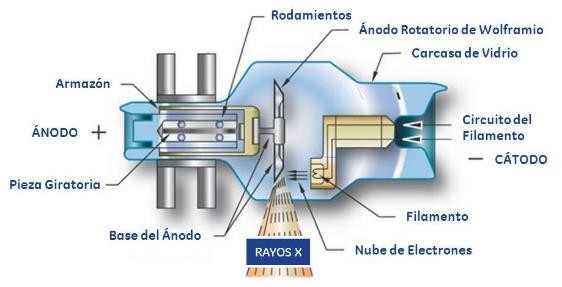
- Tubo generador de rayos X: es el elemento del sistema el cual mediante la colisión de electrones produce la generación de un haz de rayos X.
- Colimador de levas: este se encarga de adaptar el haz a las dimensiones deseadas para obtener un contraste óptimo de la imagen obtenida.
- Detectores: estos se configuran en forma de matriz y se encargan de captar los niveles de atenuación de los rayos X (esta atenuación es producida por la interacción de los rayos X con el medio que atraviesa) y transmitirlos mediante canales de datos como series de valores al sistema informático de adquisición de datos del equipo.
- Mesa de paciente: en esta es donde se situará el paciente al cual se le realizará la exploración. El funcionamiento de dicha mesa de paciente, esta automatizado y sincronizado con el gantry permitiendo realizar movimientos de elevación/descenso y de desplazamiento longitudinal a una velocidad preestablecida la cual permite situar el área de estudio y determinar el solapamiento de los cortes.

- Sistema de adquisición de datos o DAS: es un dispositivo que mide la intensidad de corriente recibida por parte de los detectores y mediante un software, estos datos los transforma en imágenes.
- Consola de mando: es des de donde el usuario autorizado visualizará las imágenes obtenidas y des de donde podrá configurar los parámetros de la prueba diagnóstica a realizar. Mediante esta también podrá comunicarse con el paciente, realizar movimientos de la mesa de paciente, inclinar el gantry y realizar disparos de rayos X.

- Generador de alto voltaje: este se encarga de generar el alto voltaje necesario para alimentar el tubo generador de rayos X.
Historia
Características necesarias de las instalaciones donde se ubicará el sistema TAC Optima 520
Las instalaciones donde se ubicará el sistema TAC Optima 520 deberán cumplir las siguientes medidas y requisitos técnicos y de diseño:
- El acceso a las salas deberá ser controlado.
- Las puertas de acceso deberán permanecer cerradas cuando haya emisión de rayos X.
- Las salas de radiodiagnóstico no serán lugares de paso para acceder a otras dependencias.
- Los pupitres de control de los equipos de rayos X han de estar protegidos mediante mamparas blindadas, a ser posible fijas o estructurales.
- Las mamparas blindadas que protegen la zona de los pupitres de control han de disponer de visores y han de estar previstas la comunicación con el paciente.
- Los soportes verticales portachasis, de cualquier tipo, para efectuar radiografías no se colocarán en:
- Zonas del puesto de control.
- Muros de las salas de revelado o cámaras oscuras o lugares de almacenamiento de películas, a menos que el blindaje y los tiempos de almacenamiento sean tales que el velo (densidad óptica) de las mismas no pueda aumentar en más de 0,05 por este motivo. La inmediata proximidad de las puertas y de manera que el haz directo pueda dirigirse hacia las mismas.
- El diseño se efectuará de forma que en la medida de lo posible no se dirija el haz directo de radiación hacia las mamparas que protegen el pupitre de control, puertas de acceso y ventanas. Análogamente se aconseja no dirigirlos hacia la cámara oscura, a no ser que las barreras hayan sido diseñadas para ello.
- No se dispondrán 2 tubos de rayos X en la misma sala alimentados por distintos generadores, a no ser que exista una barrera de protección entre ellos. (Se exceptúan las instalaciones con funcionamiento simultáneo o alterno en dos proyecciones sobre el mismo paciente.)
- Cuando existan dos o más tubos alimentados por el mismo generador, ubicados en la misma sala, no se preparará a un nuevo paciente, cuando uno de ellos esté en funcionamiento. Finalmente, la planificación y diseño de las instalaciones ha de efectuarse teniéndose en cuenta consideraciones futuras (carga de trabajo, futuras ampliaciones, etc). Asimismo, han de tomarse en consideración no solo los límites de dosis actuales, sino que es imprescindible introducir, en todos los casos, el criterio ALARA (As Low As Reasonably Achievable).
- Las zonas Vigiladas y controladas de una Insta lalación, deberán estar convenientemente señalizadas mediante el símbolo Internacional de un trébol bordeado de puntos radiales, con objeto de indicar que únicamente existe riesgo de irradiación externa, enmarcado en una orla rectangular del mismo color que el trébol.
- La sala de la instalación donde se situé la fuente de rayos X deberá estar totalmente blindada para evitar la propagación de rayos X fuera de esta. Para realizar dicho blindaje de la sala, habitualmente se utilizan planchas de plomo, no obstante, en muchos casos las propias paredes de la instalación pueden ofrecer un blindaje significativo o incluso substituir la función del plomo, por esta razón se deberá comprobar la equivalencia entre el plomo y otros materiales. Para determinar el espesor de la barrera para evitar la propagación de los rayos X se suelen utilizar los siguientes métodos:
- Estimar el campo de radiación que existiría en la zona a proteger si no hubiera blindaje, fijar como hipótesis un tope para el valor de dosis y deducir el espesor necesario para atenuar el valor de campo hasta dicho tope.
- Utilizar directamente tablas que contienen los resultados de aplicar el método anterior para un elevado número de hipótesis de partida.
- Por último se pueden utilizar, por razones prácticas, espesores normalizados a uno o dos valores para todas las barreras. Esto es aceptable en la mayoría de los casos, en los que las condiciones de trabajo (distancias, cargas de trabajo...) están dentro de los márgenes habituales. Por otra parte, para evitar fugas de radiación de la sala se tendrá que tener en cuenta las siguientes especificaciones de instalación:
- Juntas: las juntas entre las planchas de plomo deberán ser construidas de modo que las superficies estén en contacto y con un solapamiento de al menos 1 cm o dos veces el espesor de la plancha. Las barreras protectoras construidas con bloques sólidos o ladrillos deberán tener mortero (sin huecos) de al menos la misma densidad que los bloques. Las juntas entre diferentes clases de materiales deberán ser construidas de tal modo que no se debilite la protección total de la barrera, por ejemplo una extensión del plomo dentro del hormigón podría ser necesaria para atenuar la radiación dispersa, aunque normalmente en instalaciones de diagnóstico convencionales no se suele requerir esta extensión del plomo.
- Aberturas en barreras protectoras: las aberturas en barreras protectoras para puertas, ventanas, conducciones para ventilación, etc. pueden requerir algún tipo de apantallamiento para asegurar que se mantiene el grado total de protección requerido. Siempre que sea posible, la abertura deberá estar localizada en una barrera secundaria, en las que los espesores de blindaje requeridos son menores. El diseño de estos apantallamientos depende de los siguientes factores:
- Energía de la radiación
- Orientación y tamaño del campo de radiación.
- Tamaño y localización de la abertura en la barrera protectora.
- Relación geométrica entre la fuente de radiación y la abertura.
- Relación geométrica entre la abertura y las personas, materiales o instrumentos a proteger. A modo general, una protección efectiva con el mínimo coste se ha de obtener considerando todos los factores en cada una de las instalaciones individuales. Normalmente, el material de blindaje más económico para un apantallamiento es el plomo, porque la cantidad de radiación dispersada por este material es menor que la dispersada por materiales más ligeros. La barrera de protección primaria en salas de radiodiagnóstico no necesita extenderse más de 2,10 m desde el suelo; por tanto, las aberturas en la pared por encima de esta altura, generalmente, no requieren apantallamiento.
- Accesos a la sala de radiodiagnóstico: se pueden utilizar varios métodos para proveer accesos a la sala de radiodiagnóstico. El más conveniente sería disponer de una puerta plomada directamente al interior de la sala. Los requerimientos de plomo, o su equivalente para una puerta, dependerá de la energía de la radiación, de la carga semanal y de la orientación del haz.
- Ventanas de observación: las ventanas de observación para salas de radiodiagnóstico están normalmente hechas de vidrio plomado.
Estas medidas y requisitos técnicos y de diseño han sido extraídas en su totalidad del documento nº 5.11 generado por el consejo de seguridad nuclear el cual trata sobre aspectos técnicos de seguridad y protección radiológica de instalaciones médicas de rayos X para diagnóstico.
Instalación
La instalación de dicho sistema consta de los siguientes pasos:
- Desembalaje y colocación en la sala de Gantry y mesa de paciente.
- Anclaje de Gantry y mesa de paciente al suelo de la sala.
- Nivelación y ajuste de Gantry y mesa de paciente.
- Instalación y configuración del sistema de adquisición de datos y la consola de mando.
- Instalación del generador de alto voltaje y comprobación de voltajes correctos en las salidas.
- Interconexión cableada de todos los elementos del sistema.
- Configuración y calibración del sistema.
- Pruebas de verificación mediante fantoma.
Autores : Xavier Pardell , Héctor Sanabria